Emil Beauseigneur: Engineering in action
Welcome to my project portfolio, a selection of Projects that show my problem solving style, technical capability, and focus on building systems that perform, by using my embedded systems, automation, and instrumentation expertise.

Underwater optical wireless communication
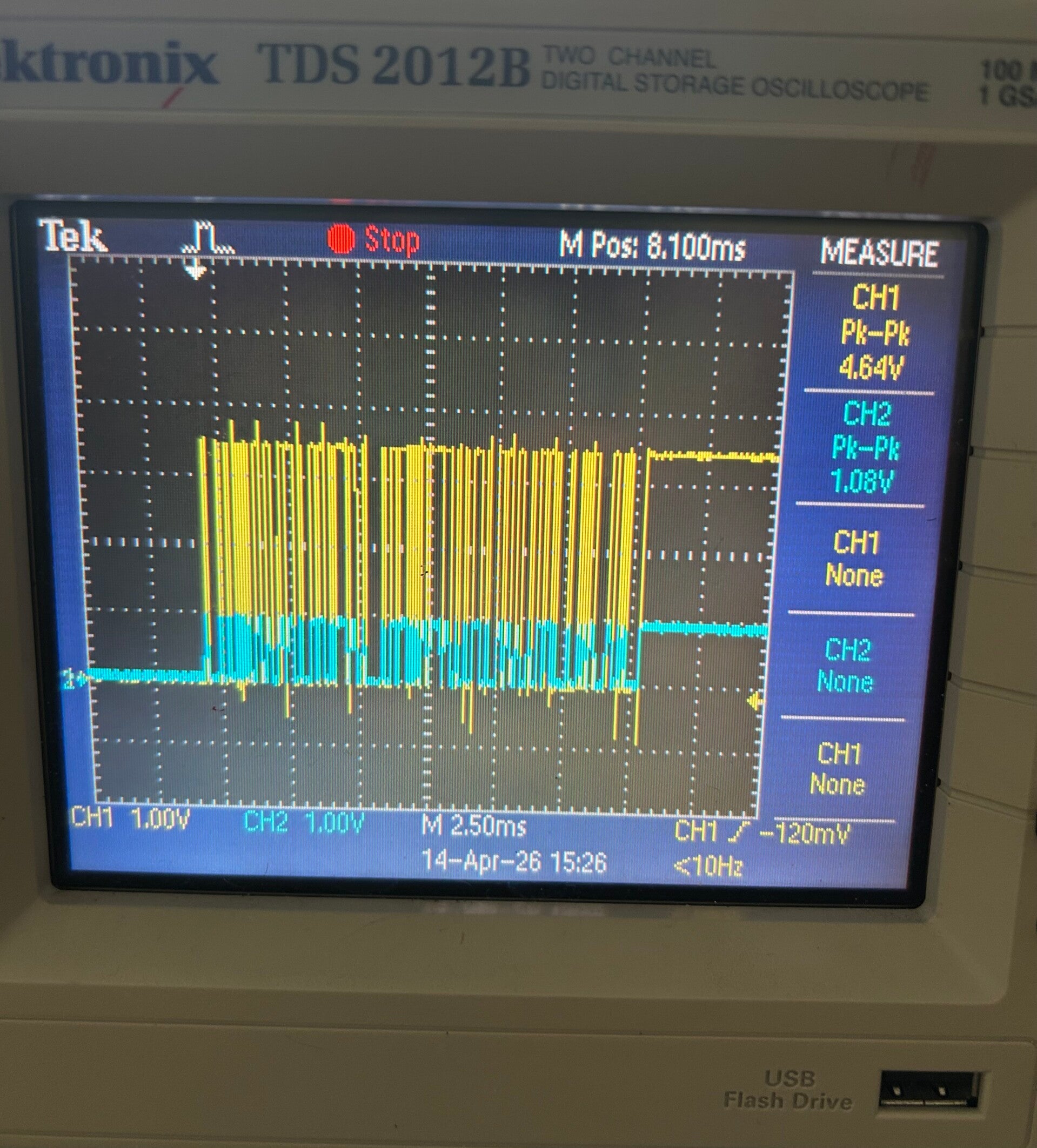
For my final year project, I designed and modelled an innovative underwater optical communication link operating in the blue-green spectral region. My work involved building a comprehensive Beer Lambert channel model to precisely analyse attenuation, scattering, and transmission losses. Through Python simulations, I meticulously guided hardware selection and optimised system parameters. I developed embedded control logic in C and FreeRTOS to manage critical timing, sensing, and data acquisition, culminating in the successful prototyping of the optical link and evaluation of signal integrity under diverse water conditions.
Problems solved: I tackled severe signal attenuation in water, significant noise and instability in the received signal, the critical challenge of aligning the transmitter and receiver, and the need for reliable modulation and demodulation despite environmental noise.
Engineering & technical skills: I utilised Beer Lambert modelling to predict attenuation and choose the optimal wavelength. I applied signal processing (filtering, smoothing, thresholding) to clean up noisy received signals, programmed embedded C to control the LED/laser driver and read photodiode data in real time, conducted thorough data acquisition and calibration, and mastered optical alignment techniques to maximise received power.



LiDAR‑Based Truck Positioning System
Overview
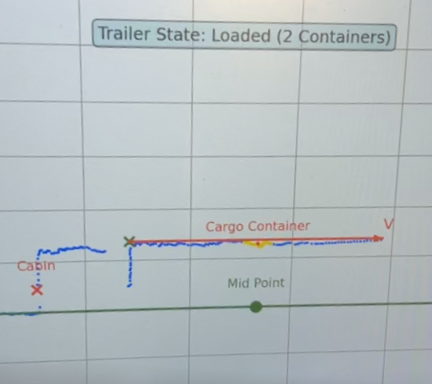
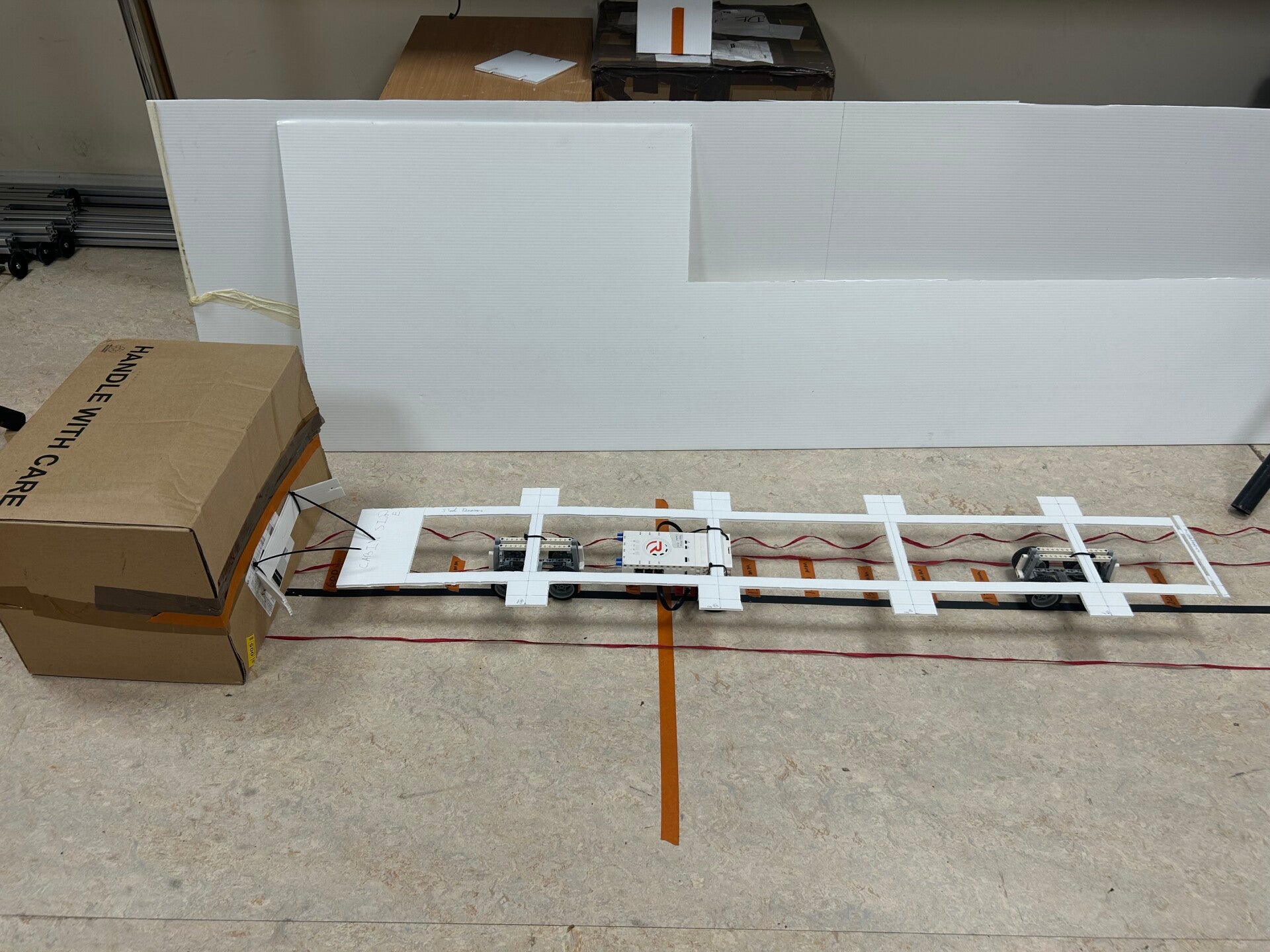
This system was developed during applied research with the IMaR Technology Gateway and Liebherr Container Cranes, focusing on improving real time vehicle positioning. A real time sensing system that uses LiDAR and an orientation sensor to measure a truck’s position accurately, even when the sensor or vehicle is moving.
Key Challenges
• Noisy LiDAR readings caused by reflections and surface changes
• Distance errors from small tilt or rotation of the sensor
• Unstable detection thresholds in different environments
• Need for low latency, real time processing
Engineering Approach
• Sensor fusion combining LiDAR data with IMU/orientation readings
• Real time filtering (moving average, median) to stabilise noisy signals
• Embedded C/Python for continuous data capture and processing
• Calibration and error analysis to tune accuracy and reduce false triggers
• Structured detection logic for consistent performance
Result
A stable, lowl atency positioning system capable of tracking truck movement with reliable accuracy in real world conditions.


Robotic telescope automation
At Blackrock Castle Observatory, I worked to develop both the hardware and software for a fully robotic 0.3m telescope. My role included aligning and configuring a Losmandy G11 mount, integrating various sensors, and implementing ASCOM based control using Python and JavaScript to automate the dome, mount, and camera. Crucially, I connected a real time weather station API to drive sophisticated safety logic for dome operations, significantly reducing equipment risk. I also authored a detailed literature review to support the observatory’s long term strategic goals.
Problems solved: A key challenge was synchronising multiple hardware components including motors, sensors, and the ASCOM interface. Achieving accurate pointing and tracking, especially over extended periods, was another hurdle, as was automating a system originally designed for manual operation, which required extensive reverse engineering and reliable control logic. Finally, handling real world disturbances such as wind, vibration, and mechanical backlash demanded robust solutions.
Engineering & technical skills: My skills included advanced control systems design, meticulous sensor integration, robust API development, Python and JavaScript programming expertise, and deep familiarity with the ASCOM framework.

Beyond projects: my engineering capabilities
The projects above reflect how I approach engineering: clear system thinking, disciplined design, and a focus on building solutions that work reliably in real conditions. My strengths extend across embedded systems, instrumentation, automation, and data driven problem solving. I enjoy tackling complex technical challenges, integrating hardware and software, and developing systems that are robust, safe, and grounded in real world performance. This mindset guides my work, whether I’m modelling a physical system, designing embedded code, or validating a prototype.